Temporal difference methods and n-steps methods
Теги: machine-learning r-learning
Temporal difference (TD) методы являются сочетанием [monte-carlo] методов и [dynamic-programming]. TD методы позволяют обучаться непосредственно на опыте, не требуя модели окружающей среды (как в методах Монте-Карло) и обновляют оценки, основываясь в т.ч. и на других оценках (бустрепинг) как в динамическом программировании.
Преимущества TD методов:
- не нужна модель среды
- онлайновый (полностью инкрементный) режим обучения (не нужно ждать конца эпизода)
q-learning
- Q-learning - TD-управление с разделенной стратегией - обученная функция ценности действий \(Q\) непосредственно аппроксимирует истинную оптимальную функцию ценности, независимо от стратегии, которой следует агент. Стратегия в данном случае определяет какие пары состояние-действие посещаются и обновляются.
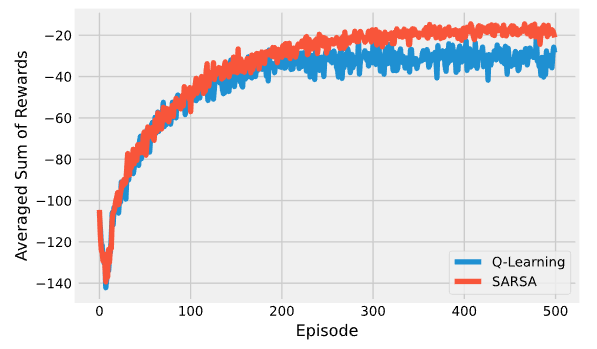
- SARSA - в отличае от Q-learning sarsa усредняет ожидаемую доходность по всем прогонам (это более общий случай TD метода)
- Expected SARSA - вместо того, чтобы максимизировать по парам состояние-действие вычисляется мат.ожидание с учетом вероятности выбора действия с учетом текущей стратегии. Алгоритм вычислительно сложнее SARSA, но устраняет дисперсию случайного выбора действия в следующий момент времени.
Сравнение на примере Gridworld:
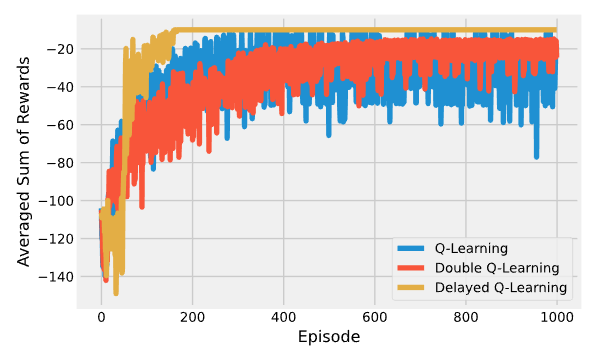
Развитие q-learning:
- двойное Q-обучение решает проблему статистических аномалий, когда в начале обучения алгоритм разведал неоптимальное решение, но в силу его высокой ценности не может обучаться дальше.
- отложенное Q-обучение буферизирует вознаграждение вместо обновления функции ценности при каждом посещении пары состояниедействие. После n посещений буфер освобождается, а функция ценности обновляется однократно. Это позволяет убрать шум в оценке ожидаемой доходности.
Данные методы чаще всего встречаются в общих случаях RL. Иногда их так-же называют одношаговыми табличными методами (смотрят на шаг вперед). Данные методы обобщаются на n-steps-bustraping.
n-steps-bustraping
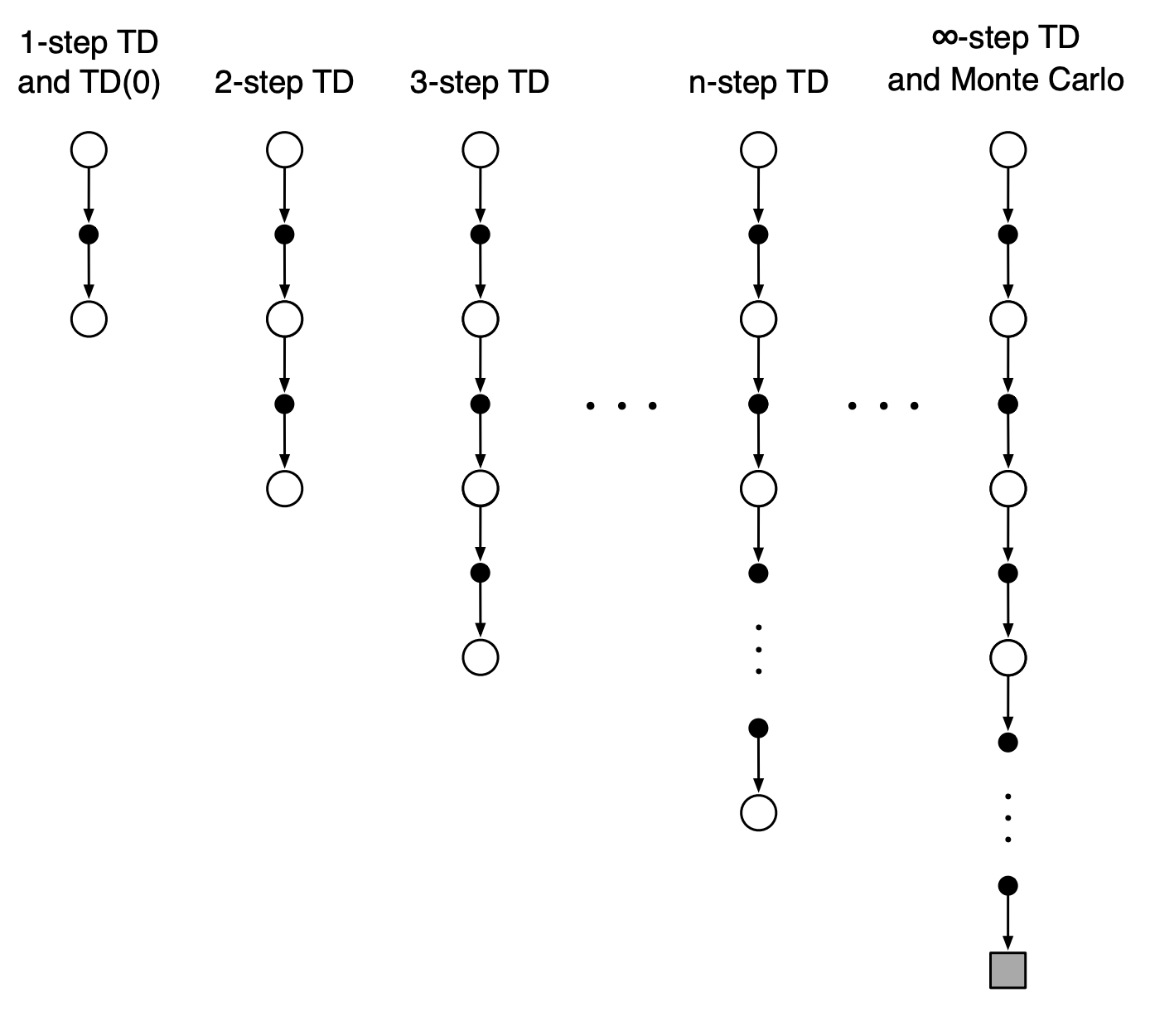
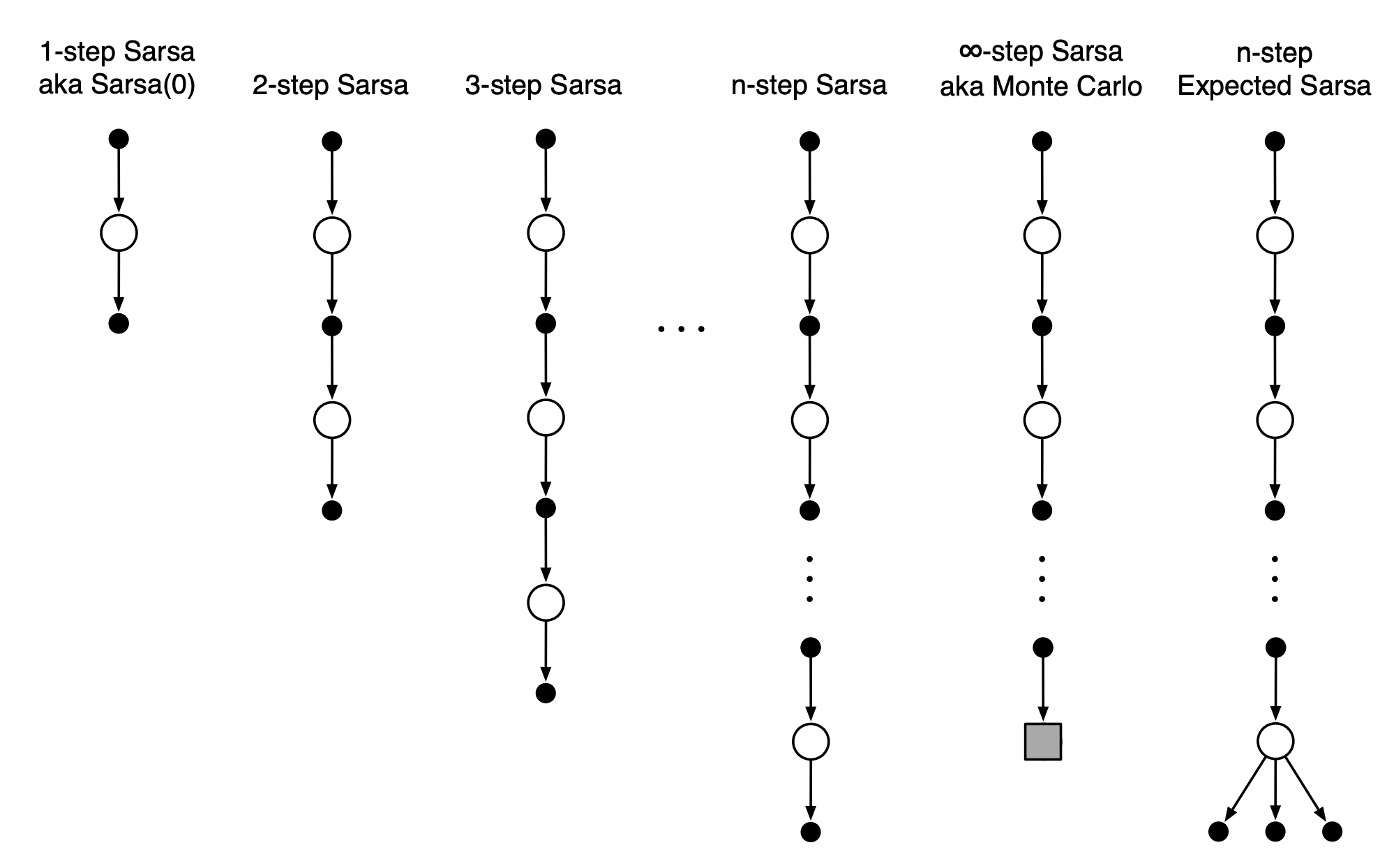
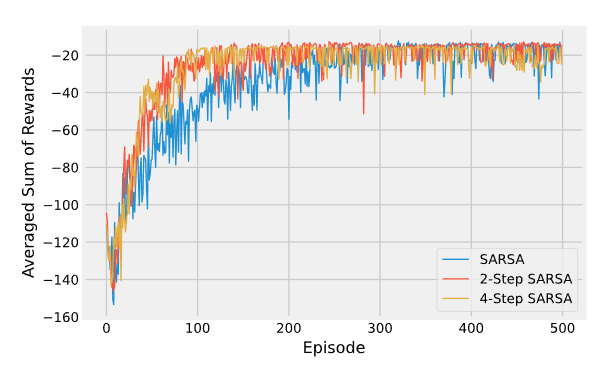
n- шаговые методы заглядывают вперед на n вознаграждений, состоянияй и действий. В примерах ниже 4-шагоый TD (или SARSA) и 4-шаговый Q-learning. Во всех n-шаговых методах существует задержка на n временных шагов перед началом обновления, поскольку только после этого становятся известны все необходимые будущие состояния.
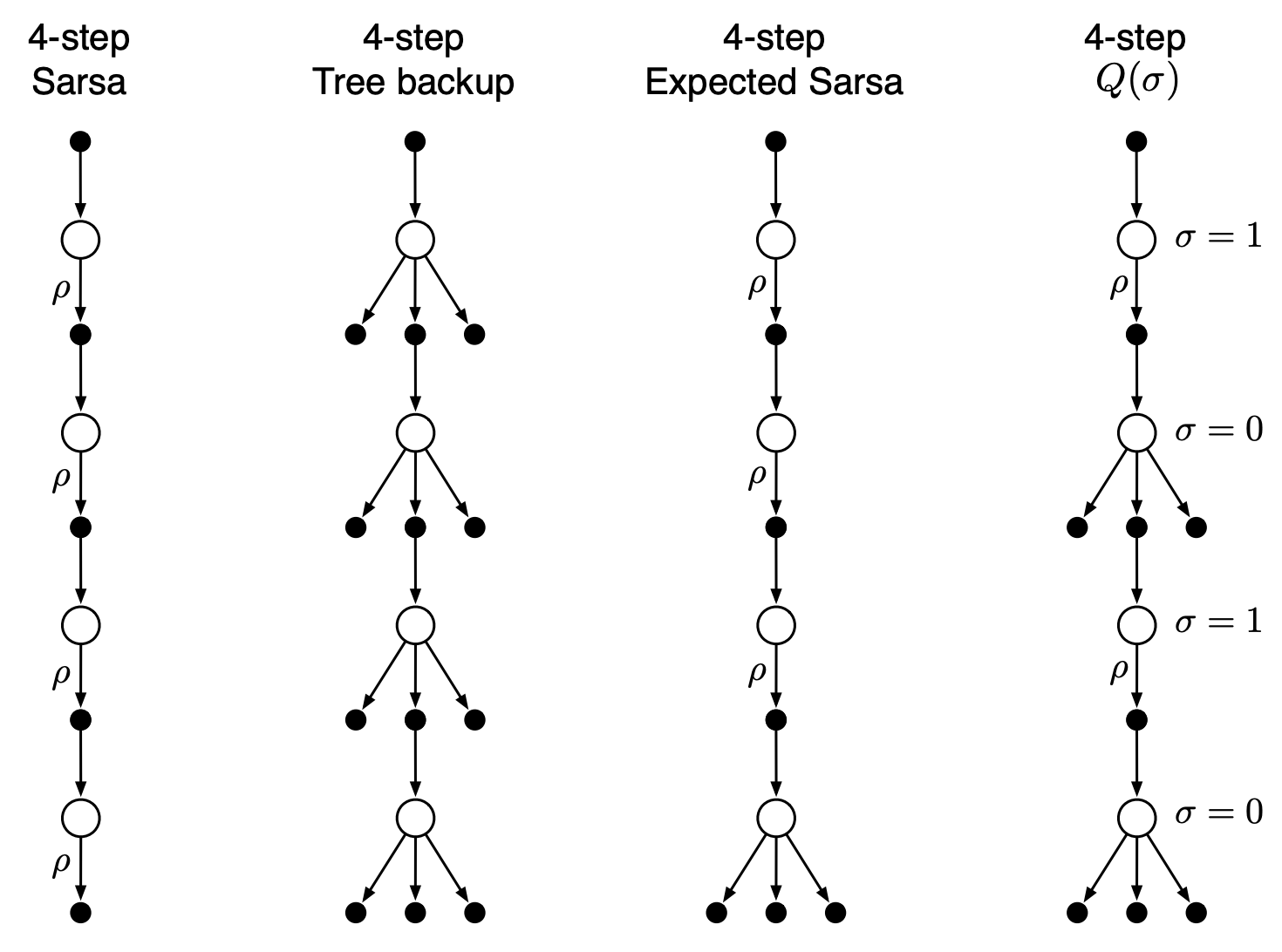
Недостаток увеличения числа шагов - рост числа вычислений и потребление памяти для запоминания состояний, действий, вознограждений и других переменных. Кроме того, приходится ждать, когда будут выполнены все n шагов, прежде чем появится возможность обновления. Одно из решений этой проблемы - смотреть не в “будущее” (что и заставляет ожидать выполнения всех шагов), а в прошлое. Это реализуется в алгоритмах с трассировкой соответствия, к примеру в SARSA(\(\lambda\)) - алгоритм запоминает какие пары состояние-действие были затронуты им при движении по тракетории в прошлом и учитывает этот вес при оценке TD-ошибки на каждой итерации. Иными словами, алгоритм не будет сильно обновлять пары, обследованные очень давно и отдаст предпочтение недавним посещениям.
Лямбда здесь - это гиперпараметр. высокие значения будут означать, что даже очень старые пары будут обновляться (даже если не имели большого значения), а низкие, что будут обновляться только самые недавние. Сравнение:
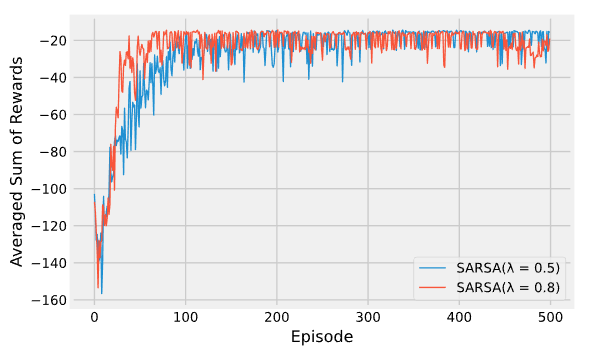
Недостаток SARSA(\(\lambda\)) - дополнительные вычислительные затраты и память (нужен еще один буфер для трассировки)
Развитие SARSA(\(\lambda\)):
- алгоритм \(Q(\lambda)\) реализует argmax при обновлении TD-ошибки - это сбрасывает трассировку, когда алгоритм натыкается на первое же нежелательное действие. В результате мы не наказываем алгоритм за предыдущие шаги как за неправильные
- нечеткий \(Q(\lambda)\) применяет правила, на основе которых сбрасывается трассировка
- fast q-learning экспоненциально уменьшает сумму предыдущего и текущего обновлений TD, что приводит к усреднению по одношаговым TD.
Смотри еще: