Pytorch geometric
Теги: machine-learning graphs pytorch
Instalation
Model
Граф используется для моделирования парных отношений (ребер) между объектами (узлами). Отдельный граф в pyg описывается экземпляром torch_geometric.data.Data, который по умолчанию содержит следующие атрибуты:
data.x: матрица признаков узла с размернойстью[num_nodes, num_node_features]data.edge_index: связи графа в форматеCOOс размерностью[2, num_edges]и типом данныхtorch.longdata.edge_attr: матрица фичей ребер с размерностью[num_edges, num_edge_features]data.y: Цель для обучения (может иметь произвольную размерность), например, размерность на уровне узла[num_nodes, *]или уровне графа[1, *]data.pos: матрица положения узла с размерностью[num_nodes, num_dimensions]
Ни один из этих объекто в не обязателен. Кроме того, можно создавать собственные аттрибуты произвольной размерности и типов.
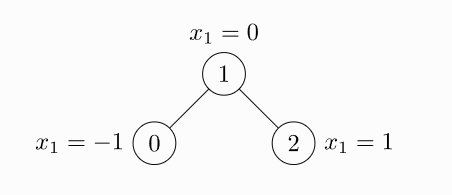
Пример невзвешенного и неориентированного графа с тремя узлами и четырьмя ребрами. Каждый узел содержит ровно одну функцию:
import torch
from torch_geometric.data import Data
edge_index = torch.tensor([[0, 1, 1, 2],
[1, 0, 2, 1]], dtype=torch.long)
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
data = Data(x=x, edge_index=edge_index)
>>> Data(edge_index=[2, 4], x=[3, 1])
edge_index, то есть тензор, определяющий исходные и целевые узлы всех ребер, не является списком кортежей. Если вы хотите записать свои индексы таким образом, вы должны транспонировать и вызывать contiguous() перед передачей их конструктору данных.
import torch
from torch_geometric.data import Data
edge_index = torch.tensor([[0, 1],
[1, 0],
[1, 2],
[2, 1]], dtype=torch.long)
x = torch.tensor([[-1], [0], [1]], dtype=torch.float)
data = Data(x=x, edge_index=edge_index.t().contiguous())
>>> Data(edge_index=[2, 4], x=[3, 1])
Хотя граф имеет только два ребра, нам нужно определить четыре кортежа индексов, чтобы учесть оба направления ребра.
Помимо хранения ряда атрибутов уровня узла, уровня ребра или уровня графа, Data предоставляет ряд полезных служебных функций
print(data.keys)
>>> ['x', 'edge_index']
print(data['x'])
>>> tensor([[-1.0],
[0.0],
[1.0]])
for key, item in data:
print(f'{key} found in data')
>>> x found in data
>>> edge_index found in data
'edge_attr' in data
>>> False
data.num_nodes
>>> 3
data.num_edges
>>> 4
data.num_node_features
>>> 1
data.has_isolated_nodes()
>>> False
data.has_self_loops()
>>> False
data.is_directed()
>>> False
# Transfer data object to GPU.
device = torch.device('cuda')
data = data.to(device)
Весь функционал объекта data смотри в документации
Датасеты
pyg содержит большое количество общих эталонных наборов данных, например, все наборы данных Planetoid (Cora, Citeseer, Pubmed), все наборы данных для классификации графов с chrsmrrs.github.io и их очищенные версии, QM7 и QM9. набор данных и несколько наборов данных 3D mesh/point датасетов, таких как FAUST, ModelNet10/40 и ShapeNet.
Инициализация набора данных проста. Инициализация набора данных автоматически загрузит необработанные файлы и обработает их в ранее описанном формате данных. Например, можно загрузить набор данных ENZYMES (состоящий из 600 графов в 6 классах).
from torch_geometric.datasets import TUDataset
dataset = TUDataset(root='/tmp/ENZYMES', name='ENZYMES')
>>> ENZYMES(600)
len(dataset)
>>> 600
dataset.num_classes
>>> 6
dataset.num_node_features
>>> 3
data = dataset[0]
>>> Data(edge_index=[2, 168], x=[37, 3], y=[1])
data.is_undirected()
>>> True
Первый граф в наборе данных содержит 37 узлов, каждый из которых имеет 3 фичи. Имеется 168/2 = 84 неориентированных ребер, и граф относится ровно к одному классу. Кроме того, объект данных содержит ровно одну цель на уровне графа.
Можно использовать срезы, long или bool тензоры для разделения набора данных. Например, чтобы создать разделение екфшт/еуые 90/10:
# shuffle
dataset = dataset.shuffle()
# or equal
perm = torch.randperm(len(dataset))
dataset = dataset[perm]
train_dataset = dataset[:540]
>>> ENZYMES(540)
test_dataset = dataset[540:]
>>> ENZYMES(60)
Ноды бенчмарков могут содержать следующие метки (пример для датасета cora):
- train_mask обозначает, на каких узлах тренироваться
- val_mask указывает, какие узлы использовать для проверки, например, для выполнения ранней остановки
- test_mask указывает, на каких узлах тестировать
data.train_mask.sum().item()
>>> 140
data.val_mask.sum().item()
>>> 500
data.test_mask.sum().item()
Mini-batch
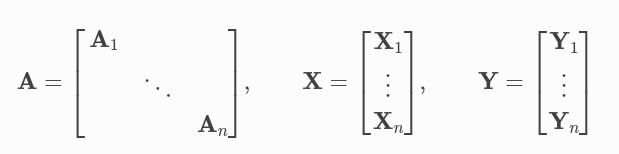
Нейронные сети обычно обучаются в пакетном режиме. pyg обеспечивает распараллеливание мини-пакетов за счет создания разреженных блоков диагональных матриц смежности (определяемых параметром edge_index) и конкатенации фич и целевых матриц в измерении узла. Эта композиция позволяет различать различные узлы и ребры в отличии от одного пакета.
torch_geometric.loader.DataLoader занимается данным процессом конкатенации
from torch_geometric.datasets import TUDataset
from torch_geometric.loader import DataLoader
dataset = TUDataset(root='/tmp/ENZYMES', name='ENZYMES', use_node_attr=True)
loader = DataLoader(dataset, batch_size=32, shuffle=True)
for batch in loader:
batch
>>> DataBatch(batch=[1082], edge_index=[2, 4066], x=[1082, 21], y=[32])
batch.num_graphs
>>> 32
В torch_geometric.data.Batch batch - вектор-колонка, который мапит каждую ноду в граф бача. Вы можете использовать его, например, для усреднения признаков узла в измерении узла для каждого графа отдельно
from torch_scatter import scatter_mean
from torch_geometric.datasets import TUDataset
from torch_geometric.loader import DataLoader
dataset = TUDataset(root='/tmp/ENZYMES', name='ENZYMES', use_node_attr=True)
loader = DataLoader(dataset, batch_size=32, shuffle=True)
for data in loader:
data
>>> DataBatch(batch=[1082], edge_index=[2, 4066], x=[1082, 21], y=[32])
data.num_graphs
>>> 32
x = scatter_mean(data.x, data.batch, dim=0)
x.size()
>>> torch.Size([32, 21])
Подробнее про минибатчи в pyg. Подробнее про pytorch scatter
Data transformations
Преобразования — это распространенный способ в torchvision для преобразования изображений и выполнения аугментации. pyg поставляется со своими собственными преобразованиями, которые ожидают объект data в качестве входных данных и возвращают новый преобразованный объект data. Преобразования могут быть объединены в цепочку с помощью torch_geometric.transforms.Compose и применяются перед сохранением обработанного набора данных на диске (pre_transform) или перед доступом к графу в наборе данных (transform).
Пример преобразования к набору данных ShapeNet (содержащему 17000 3D облаков точек и метки для каждой точки из 16-размерной категории).
from torch_geometric.datasets import ShapeNet
dataset = ShapeNet(root='/tmp/ShapeNet', categories=['Airplane'])
dataset[0]
>>> Data(pos=[2518, 3], y=[2518])
import torch_geometric.transforms as T
from torch_geometric.datasets import ShapeNet
dataset = ShapeNet(root='/tmp/ShapeNet', categories=['Airplane'],
pre_transform=T.KNNGraph(k=6))
dataset[0]
>>> Data(edge_index=[2, 15108], pos=[2518, 3], y=[2518])
Мы используем pre_transform для преобразования данных перед их сохранением на диск (что приводит к ускорению загрузки). Обратите внимание, что при следующей инициализации набора данных он уже будет содержать ребра графа, даже если вы не передадите никакого преобразования. Если pre_transform не совпадает с уже обработанным набором данных, вам будет выдано предупреждение.
Кроме того, мы можем использовать transform аргумент для случайного увеличения объекта данных, например, перемещая каждую позицию узла на небольшое число
import torch_geometric.transforms as T
from torch_geometric.datasets import ShapeNet
dataset = ShapeNet(root='/tmp/ShapeNet', categories=['Airplane'],
pre_transform=T.KNNGraph(k=6),
transform=T.RandomJitter(0.01))
dataset[0]
>>> Data(edge_index=[2, 15108], pos=[2518, 3], y=[2518])
Learning
Пример с GCN
from torch_geometric.datasets import Planetoid
dataset = Planetoid(root='/tmp/Cora', name='Cora')
>>> Cora()
import torch
import torch.nn.functional as F
from torch_geometric.nn import GCNConv
class GCN(torch.nn.Module):
def __init__(self):
super().__init__()
self.conv1 = GCNConv(dataset.num_node_features, 16)
self.conv2 = GCNConv(16, dataset.num_classes)
def forward(self, data):
x, edge_index = data.x, data.edge_index
x = self.conv1(x, edge_index)
x = F.relu(x)
x = F.dropout(x, training=self.training)
x = self.conv2(x, edge_index)
return F.log_softmax(x, dim=1)
Обратите внимание, что нелинейность не интегрирована в вызовы conv и, следовательно, должна применяться впоследствии (это свойственно всем операциям в PyG). Здесь мы решили использовать ReLU в качестве промежуточной нелинейности и, наконец, вывели распределение softmax по количеству классов. Обучим эту модель на обучающих узлах в 200 эпох.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
model = GCN().to(device)
data = dataset[0].to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.01, weight_decay=5e-4)
model.train()
for epoch in range(200):
optimizer.zero_grad()
out = model(data)
loss = F.nll_loss(out[data.train_mask], data.y[data.train_mask])
loss.backward()
optimizer.step()
Оценим модель на тестовых нодах
model.eval()
pred = model(data).argmax(dim=1)
correct = (pred[data.test_mask] == data.y[data.test_mask]).sum()
acc = int(correct) / int(data.test_mask.sum())
print(f'Accuracy: {acc:.4f}')
>>> Accuracy: 0.8150
Подробнее о компонентах сеток: TORCH_GEOMETRIC.NN
Message passing networks
Message passing
PyG предоставляет базовый класс MessagePassing, который помогает в создании месседж-пассинг нейронных сетей, автоматически заботясь о распространении сообщений. Пользователю нужно только определить функции \(\phi\), т. е. message(), и \(\gamma\), т. е. update(), а также используемую схему агрегации, т. е. aggr="add", aggr="mean" или aggr="max".

GCN layer

где признаки соседних узлов сначала преобразуются матрицей весов, нормализуются по их степени и, наконец, суммируются. Наконец, мы применяем вектор смещения к агрегированному результату. Эту формулу можно разделить на следующие шаги:
- Добавить петли в матрицу смежности.
- Матрица признаков узла линейного преобразования.
- Вычислить коэффициенты нормализации.
- Нормализация узловых элементов в \(\phi\).
- Суммирование признаков соседних узлов (агрегация
add). - Добавить вектор смещения.
Шаги 1-3 обычно вычисляются до передачи сообщения. Шаги 4-5 можно легко выполнить с помощью базового класса MessagePassing.
import torch
from torch.nn import Linear, Parameter
from torch_geometric.nn import MessagePassing
from torch_geometric.utils import add_self_loops, degree
class GCNConv(MessagePassing):
def __init__(self, in_channels, out_channels):
super().__init__(aggr='add') # "Add" aggregation (Step 5).
self.lin = Linear(in_channels, out_channels, bias=False)
self.bias = Parameter(torch.Tensor(out_channels))
self.reset_parameters()
def reset_parameters(self):
self.lin.reset_parameters()
self.bias.data.zero_()
def forward(self, x, edge_index):
# x has shape [N, in_channels]
# edge_index has shape [2, E]
# Step 1: Add self-loops to the adjacency matrix.
edge_index, _ = add_self_loops(edge_index, num_nodes=x.size(0))
# Step 2: Linearly transform node feature matrix.
x = self.lin(x)
# Step 3: Compute normalization.
row, col = edge_index
deg = degree(col, x.size(0), dtype=x.dtype)
deg_inv_sqrt = deg.pow(-0.5)
deg_inv_sqrt[deg_inv_sqrt == float('inf')] = 0
norm = deg_inv_sqrt[row] * deg_inv_sqrt[col]
# Step 4-5: Start propagating messages.
out = self.propagate(edge_index, x=x, norm=norm)
# Step 6: Apply a final bias vector.
out += self.bias
return out
def message(self, x_j, norm):
# x_j has shape [E, out_channels]
# Step 4: Normalize node features.
return norm.view(-1, 1) * x_j
Edge convolution

import torch
from torch.nn import Sequential as Seq, Linear, ReLU
from torch_geometric.nn import MessagePassing
class EdgeConv(MessagePassing):
def __init__(self, in_channels, out_channels):
super().__init__(aggr='max') # "Max" aggregation.
self.mlp = Seq(Linear(2 * in_channels, out_channels),
ReLU(),
Linear(out_channels, out_channels))
def forward(self, x, edge_index):
# x has shape [N, in_channels]
# edge_index has shape [2, E]
return self.propagate(edge_index, x=x)
def message(self, x_i, x_j):
# x_i has shape [E, in_channels]
# x_j has shape [E, in_channels]
tmp = torch.cat([x_i, x_j - x_i], dim=1) # tmp has shape [E, 2 * in_channels]
return self.mlp(tmp)
Свертка ребер на самом деле является динамической сверткой, которая пересчитывает граф для каждого слоя, используя ближайших соседей в пространстве признаков. К счастью, PyG поставляется с ускоренным графическим процессором методом пакетной генерации knn-графа torch_geometric.nn.pool.knn_graph():
from torch_geometric.nn import knn_graph
class DynamicEdgeConv(EdgeConv):
def __init__(self, in_channels, out_channels, k=6):
super().__init__(in_channels, out_channels)
self.k = k
def forward(self, x, batch=None):
edge_index = knn_graph(x, self.k, batch, loop=False, flow=self.flow)
return super().forward(x, edge_index)
conv = DynamicEdgeConv(3, 128, k=6)
x = conv(x, batch)
Datasets
Предоставляется два абстрактных класса для наборов данных: torch_geometric.data.Dataset и torch_geometric.data.InMemoryDataset. Последний используется для данных, целиком содержащихся в памяти. Согласно torchvision соглашению, каждому набору данных передается корневая папка, которая указывает, где должен храниться набор данных. Корневая папка разделена на две папки: raw_dir, куда загружается набор данных, и processed_dir, где сохраняется обработанный набор данных.
Кроме того, каждому набору данных можно передать transform, a pre_transform и pre_filter функцию, которые заданы None по умолчанию. Функция transform динамически преобразует объект данных перед доступом (поэтому ее лучше всего использовать для аугментации данных). Функция pre_transform применяет преобразование перед сохранением объектов данных на диск (поэтому ее лучше всего использовать для тяжелых предварительных вычислений, которые необходимо выполнить только один раз). Функция pre_filter может вручную отфильтровывать объекты данных перед сохранением. Варианты использования могут включать ограничение объектов данных, принадлежащих к определенному классу.
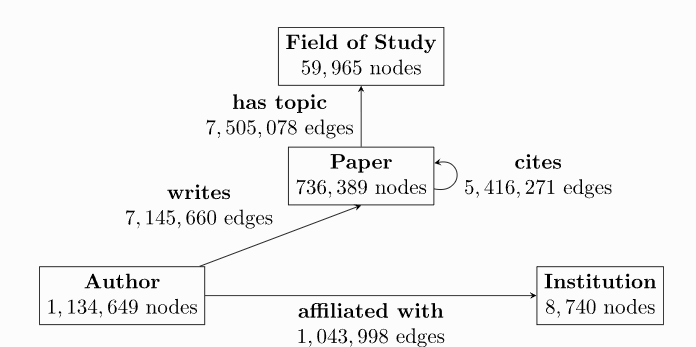
Heterogeneous graphs
Большой набор реальных наборов данных хранится в виде разнородных графов, что мотивирует введение для них специализированных функций в pyg. Например, большинство графов в области рекомендаций, таких как социальные графы, неоднородны, поскольку они хранят информацию о разных типах сущностей и их разных типах отношений. Гетерогенные графы содержат различные типы информации, связанные с узлами и ребрами. Таким образом, один тензор признаков узлов или ребер не может содержать все признаки узлов или ребер всего графа из-за различий в типах и размерностях. Вместо этого необходимо указать набор типов для узлов и ребер, соответственно, каждый из которых имеет свои собственные тензоры данных. Как следствие другой структуры данных, передача сообщений в графе изменяется соответствующим образом, что позволяет вычислять сообщение и функцию обновления в зависимости от типа узла или ребра.
Как работать с такими графами в pyg
Loading data from CSV
Управление экспериментами в GraphGym
Advanced mini-batching
Эффективная по памяти агрегация
TorchScript support
TorchScript — это способ создания сериализуемых и оптимизируемых моделей из кода PyTorch. Любую программу TorchScript можно сохранить из процесса Python и загрузить в процесс, не зависящий от Python.
Смотри еще: